Společnost Yaskawa nabízí portfolio produktů, díky kterým je předním výrobcem v oblasti měničů střídavého proudu, servopohonů, řídicí technologie a robotiky.
Balení
Overview
Roboty Motoman v obalovém průmyslu
Balicí technologie se opírá o výkonné a spolehlivé automatizační komponenty. Pro provozovatele zařízení jsou neplánované prostoje nepřijatelné - zejména na konci výrobního řetězce. To platí jak pro stroje na balení do sáčků a blistrů, tak pro kartonážní stroje nebo jakýkoli typ strojů na tvarování, plnění a uzavírání. Aby takové automatizované procesy probíhaly přesně, musí všechny jednotlivé komponenty - od řídicí jednotky až po robotiku - bezchybně spolupracovat. Pro strojní inženýry je jednodušší, efektivnější a nákladově výhodnější spolehnout se na produkty a odborné znalosti jednoho výrobce.
Společnost Yaskawa se již dlouho etablovala jako spolehlivý partner v oblasti automatizace ve světě moderních balicích technologií, přičemž dnešní výkonné řídicí jednotky pohybu a systémy pohonů v kombinaci s širokou škálou robotických řešení navržených speciálně pro balicí systémy umožňují rychlá a pohodlná strojní řešení.
Po celé Evropě i ve světě se pyšníme sítí zkušených systémových integrátorů, kteří navrhnou a postaví dokonalou balicí stanici nebo linku podle vašich konkrétních potřeb.
Navštivte také naši stránku o balení
a stáhněte si naši brožuru
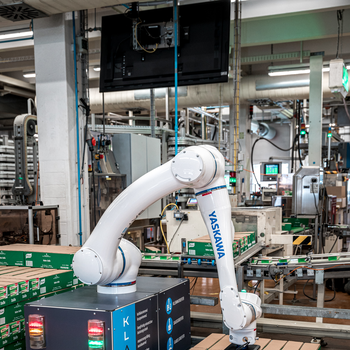
Skládání/rozkládání kartonů, montáž skříní pomocí robotů Motoman
Pro skládání/rozkládání kartonů jsou roboty atraktivní flexibilní alternativou ke klasickému skládacímu/rozkládacímu hardwaru. Robot dokáže spojit sestavení krabice a postup balení, čímž šetří podlahovou plochu.
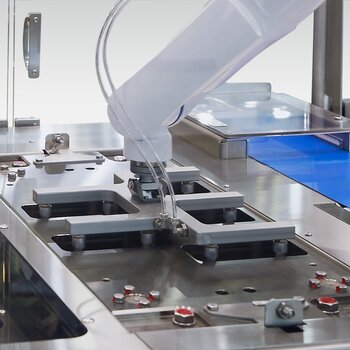
Vyzvedávání, umísťování a balení s roboty Motoman
Základní aplikace v automatizaci balení jsou Pick and Place a Pick and Pack.
Balení zboží roboty Motoman
Paletizace pomocí robotů Motoman
více informací naleznete v sekci " paletizace ".
Označování
další informace naleznete v části aplikace "Labelling".
Inženýrský nástroj MotoSim Offline simulace
Pro rozvržení paletizačních stanic doporučujeme použít software MotoSim k vytvoření virtuálního dvojčete pracovní buňky. Zde můžete uspořádat komponenty do jejich optimální polohy, zjistit optimální polohu robota uprostřed dopravníku a pásu, najít správnou výšku stojanu robota, provést testy dosahu a přístupnosti, zkontrolovat vzory stohování a výšky stohování a optimalizovat kompletní pracovní buňku z hlediska rychlosti cyklu a nároků na podlahovou plochu dříve, než se pustíte do hardwaru.