Společnost Yaskawa nabízí portfolio produktů, díky kterým je předním výrobcem v oblasti měničů střídavého proudu, servopohonů, řídicí technologie a robotiky.
Montáž
Přehled
Montáž a demontáž pomocí robotů Motoman
Průmyslové roboty lze použít k automatizaci úkonů spojených s montáží nebo demontáží výrobků, jako jsou průmyslové nebo automobilové součásti a stroje, nábytek nebo elektronické komponenty. Roboty mohou buď manipulovat s montážním nástrojem (např. maticovým navíječem), nebo přemisťovat díly do/z stacionární montážní stanice. V takovém případě se na konec ramene připevní specializované uchopovací nástroje, které umožňují manipulovat s díly a sestavami v několika fázích.
Co je robotická montáž ?
Montáž (a demontáž) je koordinovaná sekvence a kombinace mnoha jednotlivých operací, jako je identifikace dílů, třídění dílů, separace dílů, podávání dílů, manipulace s díly, polohování dílů, uchopování, vkládání, upevňování/spojování, kontrola kvality a pomocné předcházející a následující operace, jako je čištění, odstraňování otřepů, vybalování, utěsňování, gravírování, označování .... a stovky dalších! Řídicí jednotka robota je uprostřed komunikačního toku, přijímá data (ID dílu, ID úlohy) nebo odesílá data do řídicích nástrojů, odesílá stavová data do linkových PLC, systémů MES nebo cloudu. Díky tomu jsou robotické montážní úlohy náročné - a skutečně zajímavé!
Návrh pro montáž
Vycházíme-li z klasické filozofie automatizace, je vždy žádoucí nabídnout robotovi díly co nejlépe roztříděné a umístěné na nosiči dílů, v roštu, regálu, na zásobníku nebo v geometrické vrstvě. Přípravky se používají jak k prezentaci dílů určených k montáži, tak k jejich držení/upevnění/upnutí v dané poloze během vícekrokového procesu montáže.
Flexibilní robotická montáž
Doba se však změnila a flexibilita je jedním z genů robotů - příznivě ovlivňuje rostoucí požadavky dnešní flexibilní automatizace. Roboti dnes "vidí" a "cítí", zpracovávají a komunikují pokročilou logiku. K dispozici jsou pokročilé technologie, jako je strojové vidění, detekce síly/kroucení a komunikační schopnosti na úrovni zařízení/buňky/linky/zařízení a cloudu, díky nimž je robotická montáž mnohem flexibilnější a univerzálnější, pokud jde o varianty obrobku/pracovního místa/pracovního postupu, ve srovnání s propojenými, spojenými výrobními stroji
Montáž/demontáž
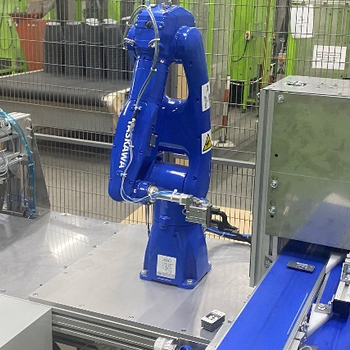
Manipulační roboty Motoman s 6/7 osami
Obvykle doporučujeme menší řadu našich manipulačních robotů, zejména řadu GP 6-osých robotů pro montážní operace, spolu s našimi řídicími jednotkami YRC1000 nebo YRC1000micro. Jsou všestranné, nabízejí vysokou rychlost, vysokou přesnost polohování a všechny potřebné možnosti podávání médií a připojení.
Pohybové schopnosti našich 7-osých robotů řady SIA jsou pro úzké prostory ještě dokonalejší
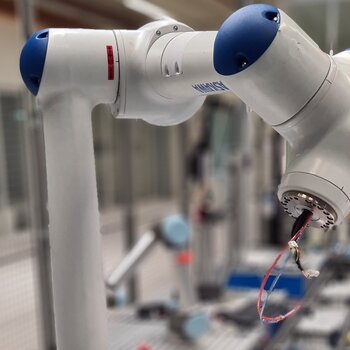
Montáž s kolaborativními roboty Motoman (řada HC)
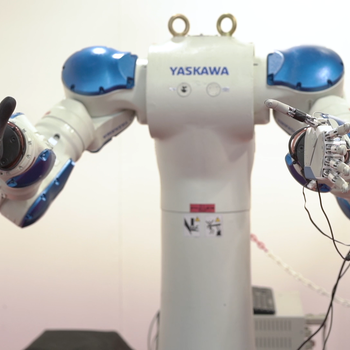
Dvouramenné roboty Motoman pro montáž/demontáž (řada SDA)
Použití dvouramenného robota k automatizaci montážních úkolů je poměrně jednoduché - nechte robota kopírovat rozsah práce manuálního pracovníka. Úspěšná instalace dvouramenného robota SDA však často začíná inspirativním nápadem na aplikaci, dělá věci jinak, je inovativní, radikální nebo převratná - jaký je váš vlastní návrh?
Montáž / demontáž
Při montáži přebírá strojové vidění mnoho rolí - některé příklady:
-detekce přítomnosti dílu
-zjišťování stavu přípravku (prázdný, upnutý díl)
-detekce umístění dílů na stole, zásobníku nebo dopravníku, i když nejsou dobře zarovnány.
-kontrola vlastností dílů za účelem identifikace variant
-kontrola všech druhů výsledků montáže (kompletnost, úroveň plnění).
-Kamery strojového vidění mohou být namontovány buď staticky (na žlabu nad objektem), nebo na samotném rameni robota - v obou případech ovládá systém strojového vidění robot.
V posledních letech se strojové vidění stalo velmi rychlým, spolehlivým, snadno použitelným a atraktivním z hlediska nákladů, školení a integrační úsilí již nejsou překážkou. Mohou být flexibilnější a efektivnější alternativou k populaci klasických instalací senzorů přiblížení.
Společnost YASKAWA Motoman nabízí vlastní, plně integrovaný inteligentní kamerový systém MotoSight2D, který je naprosto snadno použitelný a dokonale informuje robota o tom, kde má vybrat díl. Někteří dodavatelé vidění Plug&Play třetích stran, registrovaní v našem programu Smart Series, nabízejí řešení Plug&Play v kombinaci s našimi roboty.
Pokud však jde o pokročilejší nebo sofistikovanější aplikace vidění, spoléháme se na naši síť profesionálních odborníků na strojové vidění. Jako dodavatel robotů se pouze ujišťujeme, že tyto systémy vidění lze bezproblémově integrovat s našimi robotickými systémy, a poskytujeme snadná integrační rozhraní, jako je například VSTART. Naše sada pro vývoj softwaru Motoplus C++ SDK poskytuje komfortní rozhraní API pro efektivní a rychlý vývoj softwarových ovladačů. V mnoha případech však nemusíme začínat od nuly. Mnoho systémových integrátorů a dodavatelů strojového vidění v naší celosvětové partnerské síti má vynikající zkušenosti s integrací s roboty Motoman a my sami se můžeme vrátit k naší bohaté zásobárně rozhraní a řešení softwarových ovladačů, abychom zajistili, že to bude správně fungovat.
Montáž / demontáž
Při montáži přebírá strojové vidění mnoho rolí - některé příklady
-detekce přítomnosti dílu
-zjišťování stavu přípravku (prázdný, upnutý díl)
-detekce umístění dílů na stole, zásobníku nebo dopravníku, i když nejsou dobře zarovnány.
-kontrola vlastností dílů za účelem identifikace variant
-kontrola všech druhů výsledků montáže (kompletnost, úroveň plnění).
Kamery strojového vidění mohou být namontovány buď staticky (na žlabu nad objektem), nebo na samotném rameni robota - v obou případech ovládá systém strojového vidění robot.
V posledních letech se strojové vidění stalo velmi rychlým, spolehlivým, snadno použitelným a atraktivním z hlediska nákladů, školení a integrační úsilí již nejsou překážkou. Mohou být flexibilnější a efektivnější alternativou k populaci klasických instalací senzorů přiblížení.
Společnost YASKAWA Motoman nabízí vlastní, plně integrovaný inteligentní kamerový systém MotoSight2D, který je naprosto snadno použitelný a dokonale informuje robota o tom, kde má vybrat díl. Někteří dodavatelé vidění Plug&Play třetích stran, registrovaní v našem programu Smart Series, nabízejí řešení Plug&Play v kombinaci s našimi roboty.
Pokud však jde o pokročilejší nebo sofistikovanější aplikace vidění, spoléháme se na naši síť profesionálních odborníků na strojové vidění. Jako dodavatel robotů se pouze ujišťujeme, že tyto systémy vidění lze bezproblémově integrovat s našimi robotickými systémy, a poskytujeme snadná integrační rozhraní, jako je například VSTART. Naše sada pro vývoj softwaru Motoplus C++ SDK poskytuje komfortní rozhraní API pro efektivní a rychlý vývoj softwarových ovladačů. V mnoha případech však nemusíme začínat od nuly. Mnoho systémových integrátorů a dodavatelů strojového vidění v naší celosvětové partnerské síti má vynikající zkušenosti s integrací s roboty Motoman a my sami se můžeme vrátit k naší bohaté zásobárně rozhraní a řešení softwarových ovladačů, abychom zajistili, že to bude správně fungovat.
Pokud však jde o pokročilejší nebo sofistikovanější aplikace vidění, spoléháme se na naši síť profesionálních odborníků na strojové vidění. Jako dodavatel robotů se pouze ujišťujeme, že tyto systémy vidění lze bezproblémově integrovat s našimi robotickými systémy, a poskytujeme snadná integrační rozhraní, jako je VSTART.
Naše sada pro vývoj softwaru Motoplus C++ SDK poskytuje komfortní rozhraní API pro efektivní a rychlý vývoj softwarových ovladačů, včetně široké komunity ROS. V mnoha případech však nemusíme začínat od nuly. Mnoho systémových integrátorů a dodavatelů strojového vidění v naší celosvětové partnerské síti má vynikající zkušenosti s integrací s roboty Motoman a my sami se můžeme vrátit k našemu bohatému úložišti řešení rozhraní a softwarových ovladačů a zajistit, aby to fungovalo.
Citlivá montáž pomocí možnosti Servofloat
YASKAWA Servofloat je skvělá možnost přepnutí pohybových os robota do měkkého režimu pro podporu spojovacích pohybů s úzkými tolerancemi. To umožňuje citlivé spojovací pohyby, kde jsou tolerance uložení relativně malé nebo kde nelze přesně naučit cílovou polohu, aniž by došlo k zaseknutí dílců. S možností nastavení Servofloat pohybují manipulátorem vnější síly (vyplývající z náběhových fazet), protože řízení točivého momentu má přednost před řízením polohy.
Citlivý pohyb může zahrnovat konfigurovatelné jednotlivé osy ("link servofloat") nebo kombinace os robotu ("lineární servofloat"), takže pohyb ve směru montáže může být definován buď kruhově, nebo lineárně jako kartézský vektor na základě souřadnicového systému robotu.
Citlivá robotická sestava se snímači síly a momentu - Motofit
Když se běžné softwarové funkce robotů, jako je Force Limitation nebo Servofloat, dostanou na hranici svých možností (z hlediska citlivosti procesu, zamezení poškození dílů nebo bezpečnosti), je pro operace zasouvání nebo utahování často zapotřebí snímání síly. Snímač síly poskytuje zpětnou vazbu řídicímu systému robota a může měřit síly a točivé momenty působící na koncový efektor. Montážní nástroj YASKAWA MotoFit s řízením síly mění polohu robota na základě síly, která se vyskytuje při vyrovnávání nebo montáži dílů.
Pokud dáváte přednost vlastní značce snímačů síly/motoru, poskytují řídicí jednotky YRC1000/FS100 vynikající standardní komunikační rozhraní pro snímače, např. rychlé digitální a analogové vstupy, integrovaný Ethernet a další sběrnicová rozhraní. V případě, že standardní možnosti nejsou k dispozici, lze všechny druhy ovladačů senzorů vyvinout a nasadit pomocí prostředí Motoplus C++ SDK.
Citlivé montážní operace se zpětnou vazbou síly lze školit pomocí neuronových sítí.
Robotické uchopovače a měniče nástrojů
Naše síť chapadel
Při montáži, stejně jako při manipulaci a manipulaci Pick & Place, je konstrukce chapadel rozhodující pro úspěch aplikace. Konstrukce chapadel je široká oblast vyžadující hluboké odborné znalosti. I zde společnost YASKAWA spolupracuje a podporuje širokou síť dodavatelů chapadel a příslušenství. Využíváme jejich know-how a navrhujeme naše hardwarová a softwarová rozhraní tak, aby byla zajištěna dokonalá funkčnost s našimi roboty.
Společně s našimi partnery ze sítě chapadlových technologií, například v rámci iniciativy Smart Series, nabízíme řešení Plug and Play dokonale přizpůsobená našim modelům robotů.
Flexibilní robotická chapadla
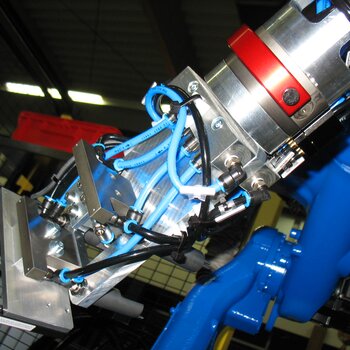
Robotické montážní práce jsou často velmi všestranné a vyžadují uchopení mnoha různých dílů nebo sestav v různých fázích montáže. Chapadla mohou být navržena tak, aby tuto flexibilitu pokryla, a to buď přidáním složitosti (víceprstá chapadla), nebo snížením složitosti (dvouprstá chapadla), otočením zápěstí robota nebo použitím vícepolohových chapadel. U přizpůsobitelných chapadel s integrovaným pohybem zvažte ovládání pohybu přímo řídicí jednotkou robotu jako externí osy.
Automatické uchopovací nástroje
Když kompexnost konstrukce chapadel dosáhne svých limitů, vždy fungují měniče nástrojů. Řídicí jednotky robotů YASKAWA podporují rychlé automatické postupy dokování s rychlou obnovou výměny elektrického/síťového/pneumatického signálu a jsou schopny spravovat velkou knihovnu různých nástrojů.
3D tištěná chapadla a díly chapadel pro roboty Motoman
Mimochodem, technologie 3D tisku se používá pro robotická chapadla a jejich náhradní díly (prsty chapadel). Technologie 3D tisku umožňuje rychlou kompaktní a lehkou konstrukci chapadel díky integraci všech funkcí, např. pneumatického napájení, do pouzdra chapadla. Prsty chapadel jsou vytištěny během několika minut. 3D tisk se používá k výrobě prototypů chapadel a k iteracím, které vedou k dokonalému návrhu prstů chapadel pro danou aplikaci.